MPU6050 sensor interface with Raspberry Pi using WiringPi
MPU6050 Accelerometer and Gyroscope interface with Raspberry Pi using WiringPi
Overview of MPU6050 Sensor
The MPU6050 sensor module is a widely used 6-axis motion tracking device, integrating the following components:
- 3-axis Accelerometer – Measures acceleration in the X, Y, and Z axes in units of g.
- 3-axis Gyroscope – Measures angular velocity in degrees per second (dps).
- Digital Motion Processor (DMP) – Handles complex computations internally to offload the microcontroller.
- Temperature Sensor – Provides onboard temperature monitoring.
- Auxiliary I2C Bus – Allows connection of additional sensors, such as a 3-axis magnetometer or pressure sensor, to provide a full 9-axis motion fusion output.
Key Features of MPU6050:
- Communication: I2C (Inter-Integrated Circuit) protocol.
- Operating Voltage: 3.3V to 5V.
- Measurement Range:
- Accelerometer: ±2g, ±4g, ±8g, ±16g.
- Gyroscope: ±250, ±500, ±1000, ±2000 degrees/sec.
- Data Format: 2’s complement form.
- Address Selection: Default I2C address is
0x68(can be changed to0x69by connecting AD0 to VCC).
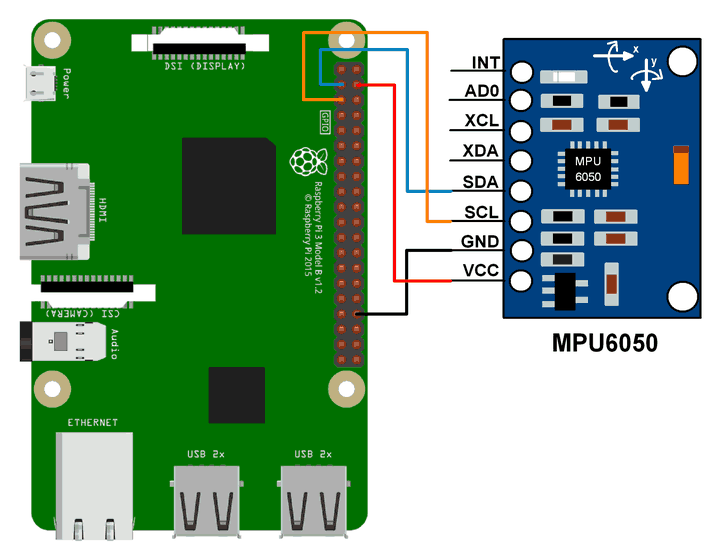
Wiring (I2C Connection)
Connect the MPU6050 to the Raspberry Pi as follows:
| MPU6050 Pin | Raspberry Pi Pin (BCM) | Function |
|---|
| VCC | 3.3V (Pin 1) | Power |
|---|
| GND | GND (Pin 6) | Ground |
|---|
| SCL | GPIO3 (Pin 5) | I2C Clock (SCL) |
|---|
| SDA | GPIO2 (Pin 3) | I2C Data (SDA) |
|---|
| AD0 | GND (For 0x68 address) | Address Select |
|---|
Steps to Use WiringPi withMPU6050
Install WiringPi (if not installed)
sudo apt update
sudo apt install wiringpi
Enable I2C on Raspberry Pi
Run sudo raspi-config → "Interfacing Options" → Enable I2C.
Check I2C Connection
Ensure the ADS1115 is detected using:
i2cdetect -y 1
You should see an entry at 0x68 (default address).
Read Data via WiringPi
If you're using the i2c command-line tool from WiringPi, try:
gpio i2c 1 0x68 0x00
#include <stdio.h>
#include <stdint.h>
#include <wiringPi.h>
#include <wiringPiI2C.h>
#define MPU6050_ACCEL_XOUT_H 0x3B // R
#define MPU6050_ACCEL_YOUT_H 0x3D // R
#define MPU6050_ACCEL_ZOUT_H 0x3F // R
#define MPU6050_GYRO_XOUT_H 0x43 // R
#define MPU6050_GYRO_YOUT_H 0x45 // R
#define MPU6050_GYRO_ZOUT_H 0x47 // R
#define MPU6050_PWR_MGMT_1 0x6B // R/W
#define MPU6050_I2C_ADDRESS 0x68 // I2C
int main()
{
int fd = wiringPiI2CSetup(MPU6050_I2C_ADDRESS);
if (fd == -1){
return 0;
}
wiringPiI2CReadReg8(fd, MPU6050_PWR_MGMT_1);
wiringPiI2CWriteReg16(fd, MPU6050_PWR_MGMT_1, 0);
signed long int x,y,z;
signed long int ax,ay,az;
while(1)
{
ax = wiringPiI2CReadReg8(fd, MPU6050_ACCEL_XOUT_H);
ay = wiringPiI2CReadReg8(fd, MPU6050_ACCEL_YOUT_H);
az = wiringPiI2CReadReg8(fd, MPU6050_ACCEL_ZOUT_H);
x = wiringPiI2CReadReg8(fd, MPU6050_GYRO_XOUT_H);
y = wiringPiI2CReadReg8(fd, MPU6050_GYRO_YOUT_H);
z = wiringPiI2CReadReg8(fd, MPU6050_GYRO_ZOUT_H);
printf("Accel x=%li Accel y=%li Accel z=%li \n", ax,ay,az);
printf("Gyro x=%li Gyro y=%li Gyro z=%li \n", x,y,z);
delay(500);
}
return 0;
}

“LVGL is the only framework that I've seen as open source Graphics Library for Microcontrollers. It’s easy to customize, adapts to any design, and the build size is tiny.”
Recent Posts
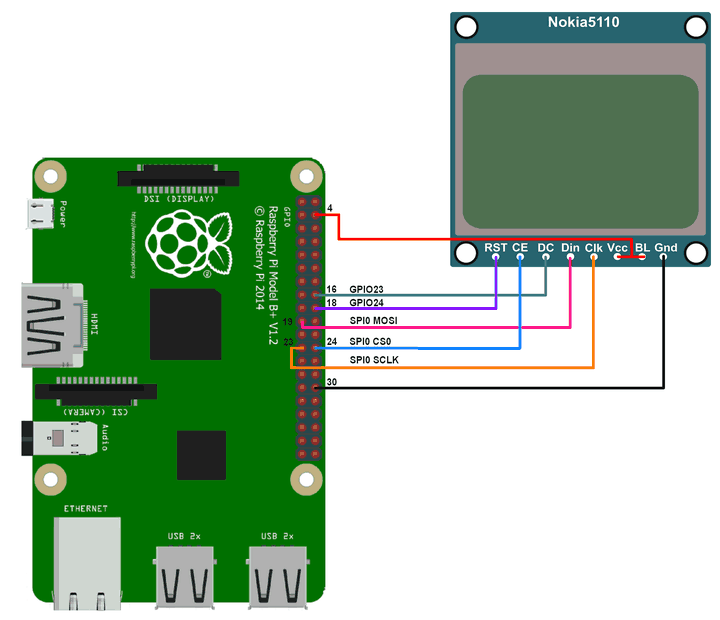
Nokia 5110 LCD with a Raspberry Pi using WiringPi
Nokia 5110 LCD PCD8544 driver with a Raspberry Pi using WiringPi
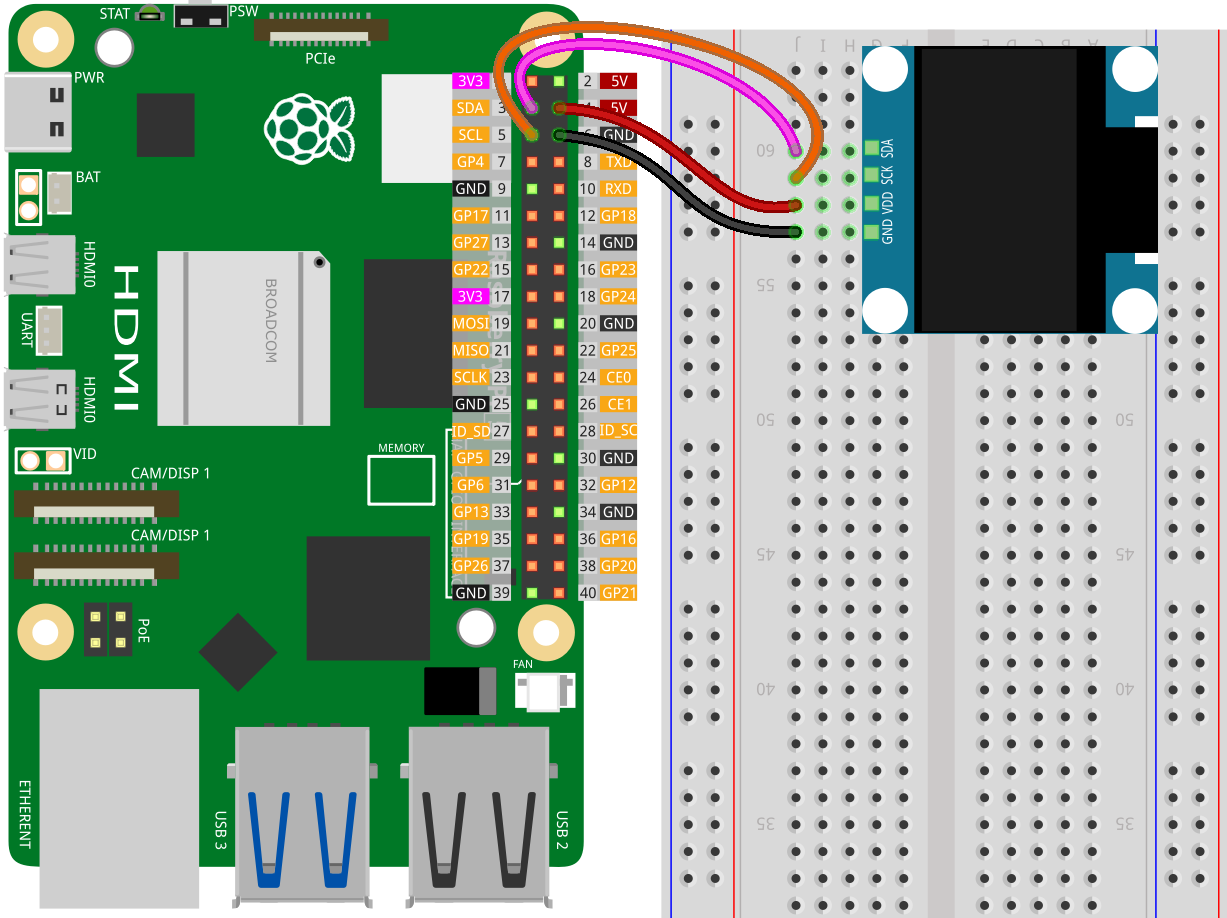
OLED ssd1306 interface with Raspberry Pi using WiringPi
OLED ssd1306 display interface with Raspberry Pi using WiringPi

ESP32 lvgl touch display control multiple relay
To control a 4-channel relay using an ESP32 with a touch display (via LVGL library), you can integrate the relay control with a graphical user interface (GUI).
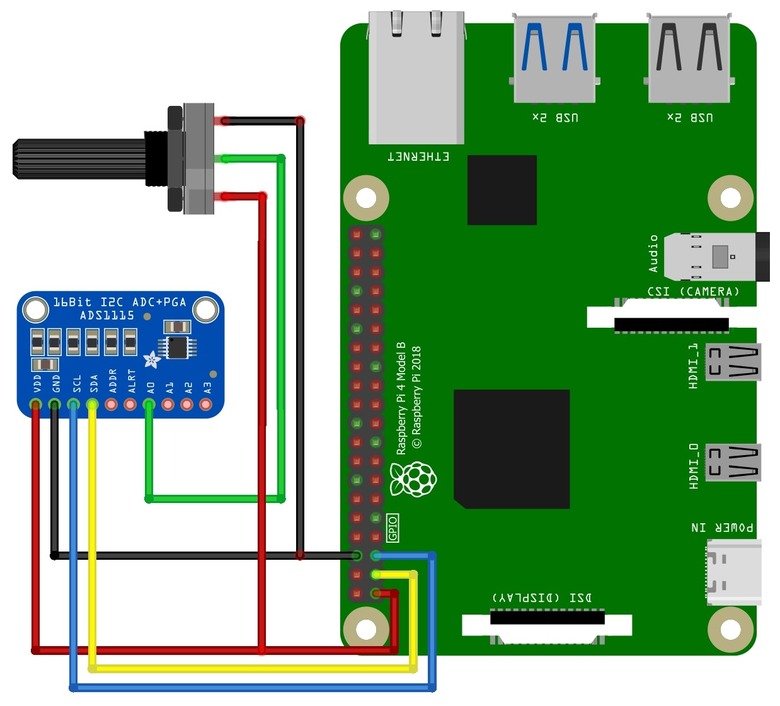
Interface the ADS1115 adc with a Raspberry Pi using WiringPi
Interface the ADS1115 analog-to-digital converter (ADC) with a Raspberry Pi using WiringPi
MPU6050 sensor interface with Raspberry Pi using WiringPi
MPU6050 Accelerometer and Gyroscope interface with Raspberry Pi using WiringPi
ESP32 Wifi http get and post method request
To perform HTTP GET and HTTP POST requests on an ESP32, you can use the WiFi and HTTPClient libraries.